2. РЕЗОНАНС ШУМАНА: ИЗМЕРЕНИЕ И МОНИТОРИНГ.
2.1. Определяющие факторы
Исследование и практическое использование резонансов Шумана требует измерения, регистрации и последующей обработки сигналов компонент электромагнитного поля в СНЧ диапазоне. Основная сложность этой задачи заключается в чрезвычайно низком уровне полезных сигналов и чрезвычайно низких частотах. Первое обстоятельство предъявляет серьезные требования к аппаратуре и уровню помех, второе - к конструкции эффективных датчиков (антенн).
В идеале для получения полной картины электромагнитного поля резонанса необходимо измерение всех пространственных компонент электрического и магнитного полей. Однако, учитывая, что основной вклад в возбуждение резонансов вносят вертикальные грозовые разряды, можно для большинства задач принять, что поляризация электромагнитного поля резонансов является вертикальной и ограничиться измерением вертикальной компоненты электрического поля и двух горизонтальных компонент магнитного. Кроме того, создание электрических антенн для сигналов резонанса Шумана является намного более сложной задачей, чем создание магнитных антенн. Поэтому на практике в большинстве случаев ограничиваются измерением только двух горизонтальных магнитных составляющих. Другие составляющие, в частности вертикальную электрическую или вертикальную магнитную, измеряют в случае особой необходимости.
Отдельную проблему представляет расположение измерительной аппаратуры в связи с существенным уровнем электромагнитных помех неприродного происхождения. Поэтому станции измерения и мониторинга размещают вдали от промышленных зон, населенных пунктов, транспортных магистралей и линий электропередач. Хорошим решением в этом смысле является размещение станций в горах, а идеальным - в Антарктике.
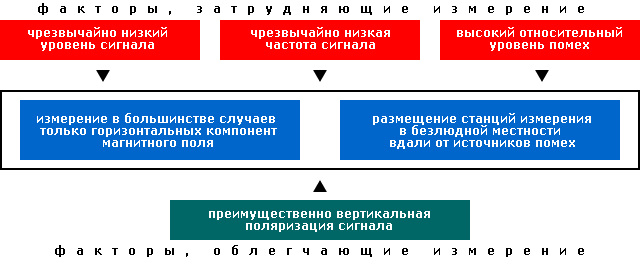
Рис. 2.1. Факторы измерения сигналов резонанса Шумана
2.2. Измерение магнитной компоненты
В качестве датчика для измерения магнитной компоненты используется катушка-зонд (search coil sensor), представляющая собой катушку индуктивности с большим числом витков. В большинстве случаев для повышения чувствительности и уменьшения габаритов она снабжается сердечником из материала с высокой магнитной проницаемостью (см. рис. 2.2). На сердечнике также может размещаться калибровочная обмотка, используемая для контроля и калибровки датчика в производстве и в эксплуатации.
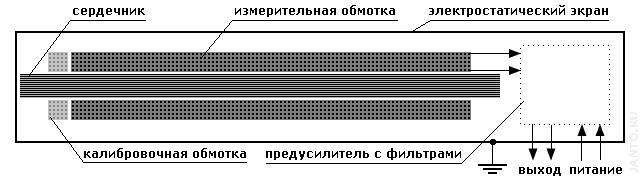
Рис.2.2. Конструкция магнитного датчика резонанса Шумана
Обмотка и сердечник обладают большой собственной емкостью, через которую в цепи датчика могут проникать электростатические помехи. Для защиты от них вся конструкция помещается в заземляемый электростатический экран, изготавливаемый из немагнитного металла, чаще всего из алюминиевой, медной или латунной фольги. В этом же экране в большинстве случаев размещают и электронный блок предварительной обработки сигнала, включающий предусилитель и набор фильтров. На рис. 2.3 для примера показано фото промышленного датчика ICS101, выпускаемого итальянской фирмой SISTEL, а на рис. 2.4 - фото датчика, спроектированного и изготовленного для станции мониторинга резонанса Шумана, расположенной в штате Айова, США.
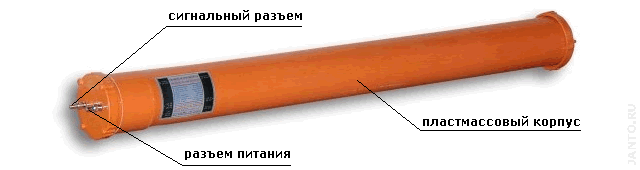
Рис.2.3. Промышленный магнитный датчик ICS101
(за основу взята иллюстрация с сайта SISTEL)

Рис.2.4. Магнитный датчик станции мониторинга в штате Айова, США
(источник иллюстрации: Construction And Deployment Of An ULF Receiver For The Study Of Schumann Resonance In Iowa)
В качестве материала сердечника часто используют пермаллой, мю-металл или метглас. Эти материалы имеют магнитную проницаемость μ, измеряемую десятками и даже сотнями тысяч. Однако повышение уровня выходного сигнала за счет их использования достигает всего нескольких сотен, что связано с наличием фактора демагнетизации, определяемого геометрией сердечника по формуле:
[1] Nd = (d2/l2)[ln(2l/d)-1], где d и l - диаметр и длина сердечника соответственно.
Этот фактор уменьшает истиную (apparent) магнитную проницаемость μapp сердечника по отношению к внешнему магнитному полю катушки по формуле:
[2] μapp = μ/[1+Nd(μ-1)],
вследствие чего увеличение магнитной индукции в сердечнике с ростом его магнитной проницаемости начинает определяться не самой магнитной проницаемостью, а геометрией сердечника. Поэтому для удешевления датчика вместо дорогих сплавов с проницаемостью на уровне десятков и сотен тысяч могут применять гораздо более дешевые материалы с проницаемостью на уровне нескольких тысяч, например, ферриты. Это ведет к снижению чувствительности или требует увеличения числа витков катушки, но не пропорцианально изменению проницаемости, а всего лишь в несколько раз, что часто бывает экономически оправдано.
Амплитуда выходного сигнала датчика Um определяется по формуле:
[3] Um = 0.5π2fd2wμappBm,
где f - частота сигнала, Bm - амплитуда магнитной индукции измеряемой компоненты, w - число витков катушки, а d и μapp определены выше.
Значения амплитуд магнитной компоненты резонанса Шумана лежат в диапазоне единиц пТл (пикоТесла = 10-12 Тл), поэтому для получения приемлемого для последующего усиления уровня выходного сигнала (десятые доли микровольта) требуются катушки с числом витком, измеряемым десятками тысяч. Катушки с таким большим числом витков наматываются тонким проводом в несколько слоев, и, соответственно, имеют большую межвитковую емкость, что приводит к появлению собственных нежелательных резонансов. Для борьбы с паразитными резонансами применяют специальные методы намотки, а также оптимизацию параметров катушек по числу витков, диаметру провода, длине и диаметру намотки и др.
Задачей предварительной обработки сигнала является его усиление с минимальным уровнем шумов и последующая фильтрация с выделением заданной полосы частот и подавлением нежелательных детерминированных помех, например, сетевой помехи 50 Гц. Эта задача решается путем использования прецизионных малошумящих операционных усилителей и активных фильтров. В качестве примера реализации на рис. 2.5 приведена схема предварительной обработки сигнала датчика ICS101. Полученные с помощью данной схемы амплитудно-частотные характеристики датчика см. в описании датчика, а также на странице по ссылке под рисунком.
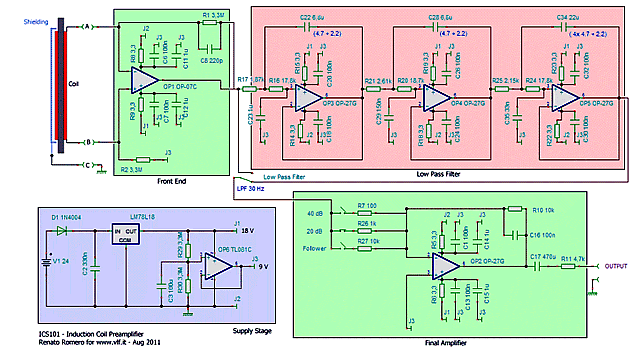
Рис.2.5. Схема предварительной обработки сигнала датчика ICS101
(источник иллюстрации: веб-страница INDUCTION COIL ICS101)
Индуктивные датчики рассмотренного типа, как правило, имеют полосу частот, начинающуюся с долей герца, чтобы кроме диапазона резонанса Шумана охватить также и диапазоны более низких частот - резонансов Альфвена и геомагнитных пульсаций. Если ограничиться минимальной частотой, необходимой только для регистрации резонанса Шумана (например, частотой 1Гц), то потребное количество витков обмотки может быть уменьшено на порядок и более, что может резко удешевить датчик и сократить его массу и габариты. Возможно и другое решение - исключение сердечника и увеличение диаметра катушки. Такой вариант широко практикуется радиолюбителями, увлекающимися приемом сверхнизкочастотных радиосигналов. Однако в научно-исследовательской практике и прикладных проектах такие решения практически не используются, т.к. наблюдение резонанса Шумана обычно проводится в комплексе с другими измерениями магнитного поля, требующими более низкочастотного диапазона.
Следует также отметить, что с первого взгляда привлекательной идеей представляется использование для измерения магнитной компоненты датчиков SQUID (superconducting quantum interference device). Они имеют очень высокую чувствительность (порядка 0,01 пТл), достаточную полосу частот (от 0 до 1000 Гц) и успешно применяются в ряде приложений, связанных с измерением сверхслабых магнитных полей. Однако необходимость охлаждения их до криогенных температур и высокий уровень шумов на данный момент пока не позволяют этому направлению конкурировать с простыми индуктивностями.
2.3. Измерение электрической компоненты
В качестве датчика для измерения вертикальной электрической компоненты используют токопроводящую сферу, диск или другое обтекаемое тело, устанавливаемое на высоте нескольких метров над землей на опоре из пакета изоляторов со сверхмалым током утечки (рис. 2.6.).

Рис.2.6. Примеры датчиков электрической компоненты резонанса Шумана
Слева - датчик обсерватории WISE, Тель-Авив, Израиль. Источник иллюстрации: сайт Atmospheric Electricity. В центре - датчик Модраской обсерватории, Словакия. Источник иллюстрации: материалы семинара CoPhys International Workshop 2008. Справа - датчик обсерватории Visnjan, Хорватия. Источник иллюстрации: страница обсерватории на сайте ВКонтакте.
Такой датчик фактически является конденсатором, одной обкладкой которого служит само тело, другой - земля, а электрическим полем между ними - вертикальная компонента естественного электрического поля. Поэтому при изменении напряженности вертикальной электрической компоненты резонанса Шумана изменяется потенциал проводящего тела относительно земли, и измерение сводится к измерению именно этого потенциала. Главной проблемой измерения при этом является малая величина емкости этого конденсатора и, соответственно, его исключительно высокое выходное сопротивление как источника электрического сигнала, на частотах измерения достигающее нескольких гигаом. Данное обстоятельство требует предельной минимизации утечек как у самого датчика, так и у входных цепей измерительного электронного блока.
Структура канала измерения электрической компоненты в целом такая же, как и канала магнитной компоненты, т.е. на его входе стоит предусилитель, далее - набор фильтров для формирования требуемой полосы пропускания, а на выходе - выходной масштабирующий усилитель с регулируемым коэффициентом передачи, подключаемый к выходам требуемых фильтров. Основной проблемой канала является обеспечение требуемого (на уровне нескольких единиц или даже десятков гигаом) входного сопротивления предусилителя при минимальном, как и в случае индуктивного датчика, уровне собственных шумов. Поэтому предусилитель часто проектируют на дискретных компонентах с истоковым повторителем на МДП-транзисторе на входе (рис. 2.7).
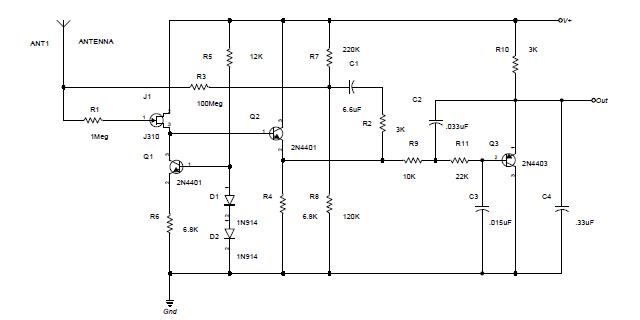
Рис.2.7. Пример предусилителя сигнала электрической компоненты резонанса Шумана
Источник иллюстрации: SRR1 - Schumann Resonance Receiver
Датчики вертикальной электрической компоненты реагируют на случайные изменения электрического поля, вызванные всевозможными посторонними факторами - движением птиц, животных, деревьев, воздуха, акустическими вибрациями, каплями дождя и т.д., поэтому требуют соответствующей защиты прилегающей среды.
Еще одной проблемой является необходимость подавления синфазной помехи, вызванной большой величиной атмосферного статического электричества.
При необходимости измерения горизонтальных компонент электрического поля резонанса Шумана используют т.н. «земляную» антенну, принцип которой основан на измерении разности потенциалов между двумя точками земной поверхности, находящимися на линии вектора поля. Для измерения в заданные точки земли заглубляют специальные свинцовые неполяризующиеся электроды, аналогичные используемым в системах катодной защиты.
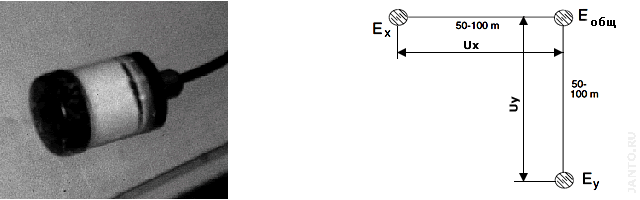
Рис.2.8. Датчик горизонтальной электрической компоненты резонанса Шумана
Источник иллюстраций: A Transportable System for Monitoring Ultra Low Frequency Electromagnetic Signals Associated with Earthquakes.
В целом публикаций по измерению электрической компоненты намного меньше, чем по измерению магнитной компоненты, что, возможно, объясняется существенно меньшей их распространенностью, а также более узкой спецификой и более сложной проблематикой.
2.4. Оцифровка и регистрация
Все интересующие параметры резонанса Шумана - центральные частоты, амплитуды, добротности и их изменение во времени могут быть получены только путем цифровой фильтрации и последующего спектрального анализа измеряемых сигналов, для чего они должны быть представлены в виде оцифрованных выборок. Оцифровку осуществляют с помощью стандартных регистраторов-дигитайзеров либо с помощью стандартных аналого-цифровых преобразователей, сопряженных с микроЭВМ. В связи с низкими частотами сигнала оцифровка каких-либо серьезных проблем не представляет. Обычно используют аналого-цифровое преобразование с разрядностью 16 - 24 бит и частотой выборки от 40 до 200 Гц. Оцифрованный сигнал записывают в буферную оперативную или флэш-память регистратора, откуда передают по проводному интерфейсу или беспроводному каналу связи (например, GSM) в удаленную ЭВМ для последующей цифровой обработки.
Для привязки оцифрованного сигнала к меткам времени используются внешние сигналы. Обычно для этой цели используется GPS-сигнал временной синхронизации, однако могут быть использованы и другие варианты, например сихронизация по радиосигналам станций точного времени или по данным NT-серверов сети Интернет.
Возможный вариант структуры системы сбора данных резонанса Шумана с передачей их в центральную удаленную ЭВМ показан на рис.2.9.
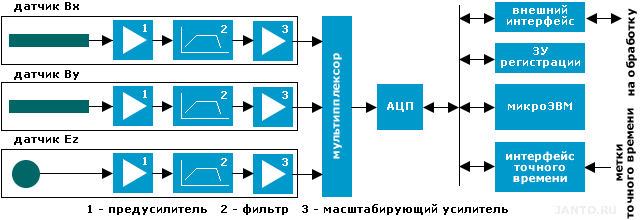
Рис.2.9. Система сбора и передачи данных резонанса Шумана
Сводная информация по датчикам компонент резонанса и Шумана и системам на их основе, найденная при подготовке данного обзора, приведена в приложении C.
2.5. Обработка
Полезную информацию, необходимую для использования резонанса Шумана в научных и практических целях, несет как сам сигнал во временнОй области, так и его спектральная характеристика. Cигналы во временной области используются для вычисления суммарных параметров электрической и магнитной компонент и вектора Пойнтинга во всем диапазоне частот. Кроме того, обработка сигнала во временнОй области позволяет обнаруживать Q-импульсы - кратковременные всплески, амплитуда которых существенно (на порядок и более) превышает фоновый уровень сигнала резонанса. Данные всплески возникают при сверхмощных грозовых разрядах, вызывающих различные световые явления в ионосфере, в частности, спрайты, и используются в качестве индикатора при «охоте» за последними.
Спектральный анализ используется для вычисления кратковременных и усредненных за заданный период параметров резонансов - центральных частот, амплитуд и добротностей и их вариаций в течение заданных интервалов наблюдения. Данные параметры используются для постоянного мониторинга состояния ионосферы, а также в различных геофизических исследованиях. Для вычисления спектральной характеристики чаще всего используют быстрое преобразование Фурье (БПФ), но для ряда задач могут использоваться и другие преобразования, например, Гильберта.
Главной проблемой при обработке сигналов резонанса Шумана является исключительно высокий уровень помех, превышающий фоновый уровень на 40-70 дБ (см. рис.2.10), поэтому первостепенной задачей является фильтрация данных помех, которая может производиться как во временной, так и в частотной области.
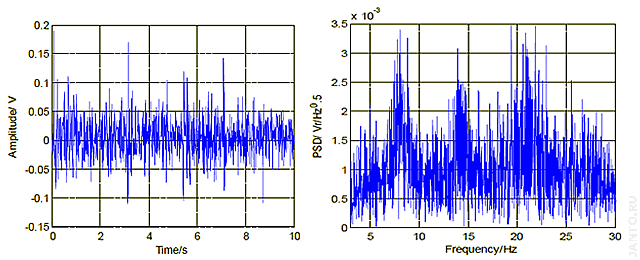
Рис. 2.10. Исходный сигнал резонанса Шумана с наложенными помехами (слева) и его спектральная характеристика (справа).
источник иллюстрации - Discussion on Schumann Resonance Measurement and Data Processing
Для фильтрации помех могут использоваться различные приемы и методы из известного арсенала статистической обработки данных и цифровой фильтрации, в частности:
- методы периодограмм, используемые для получения усредненных значений сигналов и их спектров;
- методы, основанные на алгоритмах сингулярного разложения матриц (SVD - Singular Value Decomposition), используемые для фильтрации случайных импульсных помех, например, широко используемые для обработки изображений медианные фильтры;
- методы, основанные на аппроксимации спектральных характеристик специальными функциями, из которых наиболее часто используется аппроксимация функциями Лоренца,
Для примера на рис. 2.11 показан результат фильтрации спектрограммы методом SVD, а на рис. 2.12 - результат обработки спектральной характеристики методами периодограмм, SVD и аппроксимацией по Лоренцу.
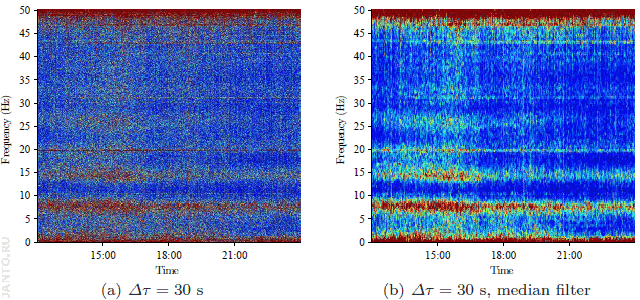
Рис. 2.11. Исходная и обработанная медианным фильтром спектрограмма резонанса Шумана.
источник иллюстрации - M.Landauskas et al. Algebraic and Spectral Analysis of Magnetic Field
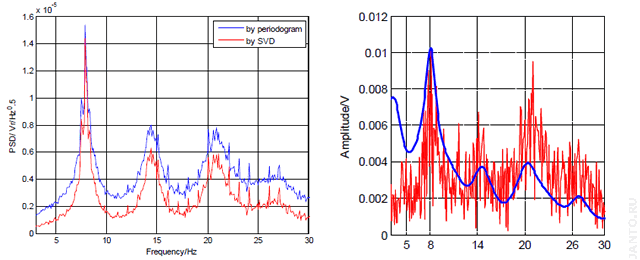
Рис. 2.12. Результат обработки спектральной характеристики методами периодограмм и SVD (слева) и аппроксимацией по Лоренцу (справа).
источник иллюстрации - Discussion on Schumann Resonance Measurement and Data Processing
Задача фильтрации помех при наблюдении за резонансом Шумана является достаточно сложной и разноплановой и зависит от параметров локальных помех и прикладных задач. Поэтому на практике использутся достаточно широкий круг методов и алгоритмов, в т.ч. постоянно ведется разработка новых. Подробный разбор данной проблематики выходит за рамки настоящего обзора и является предметом отдельной работы.
Отфильтрованные сигналы и спектры далее используются для извлечения информации, необходимой для конкретных прикладных задач. Это могут быть как параметры самих сигналов, так и параметры резонансов - частоты, амплитуды и добротности, усредненные за заданный период времени, а также их вариации. Для этой цели могут использоваться как разрабатываемые прикладные программы, так и универсальные программные пакеты, в т.ч. упомянутые выше. Проблематика прикладной обработки будет рассмотрена в главе, посвященной научно-практическим приложениям, использующим резонанс Шумана как источник геофизической информации.
2.6. Мониторинг
Исследования, связанные с наблюдением резонанса Шумана, носят длительный характер и требуют постоянного накопления и обработки данных. Данная задача решается с помощью как одиночных станций мониторинга, так и сетей станций, расположенных в различных географических районах. Такие станции и сети мониторинга могут быть как универсальными, т.е. предназначенными для получения данных общего назначения, так и специализированными, ориентированными на конкретные прикладные задачи - наблюдение за глобальной грозовой активностью, климатом, сейсмической обстановкой и другими геофизическими явлениями и параметрами. Более подробно на приложениях, основанных на использовании информации, извлекаемой из резонанса Шумана, мы остановимся в следующих главах. Краткий обзор наиболее известных и наиболее часто упоминаемых в исследовательских работах станций мониторинга приведен в приложении D.
* * * * *
Опубликовано 06.09.2016. Последнее изменение - 03.10.2016.
© Janto 2016 Все права защищены